Régulation PID
Principes de base de la régulation PID
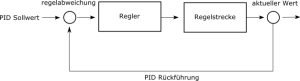
Un régulateur PID est une structure de régulation qui tente de réguler une certaine grandeur de régulation (pression, température, etc.) en fonction d’une valeur de consigne prédéfinie (valeur de consigne PID). Pour ce faire, le régulateur a besoin d’informations sur l’état actuel du système sous la forme d’une valeur de mesure (capteur de pression, capteur de température, etc.). Ce signal est appelé retour PID.
En règle générale, cette structure de régulation comporte trois parties : P = proportionnelle, I = intégrale et D = différentielle.
Comment les choses sont-elles réglées ici ?
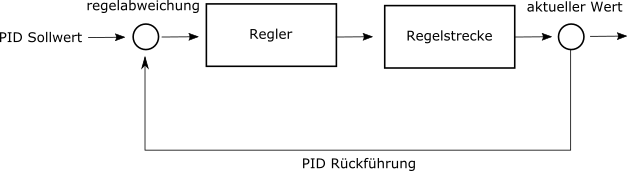
Sur l’image, on peut voir que la valeur de retour PID est déduite de la valeur de consigne PID. C’est à partir de cette valeur que le signal différentiel est généré. Si les deux valeurs sont égales, aucune correction n’est nécessaire et le variateur de fréquence ne modifiera pas sa fréquence. Si la valeur de consigne PID est supérieure à la valeur de rétroaction, le signal différentiel est positif et le variateur de fréquence augmentera sa fréquence de sortie jusqu’à ce que la valeur de consigne PID et la valeur de rétroaction PID soient égales. La fréquence est donc continuellement adaptée tant qu’il existe une différence entre la valeur de consigne PID et le retour PID.
Exemple simple:
Consigne PID égale au retour PID ==> pas de modification de la fréquence au niveau du variateur
Référence PID supérieure au retour PID ==> augmentation de la fréquence au niveau du variateur
Consigne PID inférieure au retour PID ==> diminution de la fréquence au niveau du variateur
Effet des différentes parties de la régulation PID
P – Proportion:
La part P est la part proportionnelle, ce qui signifie que l’effet dépend uniquement de la différence momentanée entre la valeur de consigne PID et le retour PID. L’inconvénient est que plus la valeur de consigne et la rétroaction se rapprochent, plus la correction est faible. Le comportement de régulation s’en trouve ralenti. En théorie, la valeur de consigne n’est jamais atteinte.
I – Proportion:
La partie I peut résoudre le problème de la partie P qui n’atteint pas la valeur de consigne. La composante I intègre la différence entre la valeur de consigne et le retour. Même en cas de petites différences, le signal de correction devient, après un certain temps, suffisamment important pour corriger l’erreur entre la valeur de consigne PID et le retour PID.
D – Proportion:
La composante D résout un autre problème du régulateur P. Comme le signal de correction ne peut jamais être supérieur à la différence entre la valeur de consigne PID et la rétroaction PID, la composante D peut brièvement amplifier cette différence et accélérer ainsi la réaction du régulateur. Mais cela n’est recommandé que si la part P et la part I ne permettent pas d’obtenir un bon comportement de régulation.
« Back