PID-regeling
Basisprincipes van PID-regeling
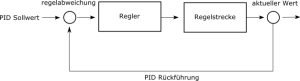
Een PID-regelaar is een regelstructuur die een specifieke regelvariabele (druk, temperatuur, enz.) naar een gespecificeerd instelpunt (PID-setpoint) probeert te regelen. Hiervoor heeft de regelaar informatie nodig over de huidige status van het systeem in de vorm van een gemeten waarde (druksensor, temperatuursensor, enz.). Dit signaal wordt PID-feedback genoemd.
Deze regelstructuur bestaat meestal uit drie delen: P = Proportioneel, I = Integraal en D = Differentieel.
Hoe is dit geregeld?
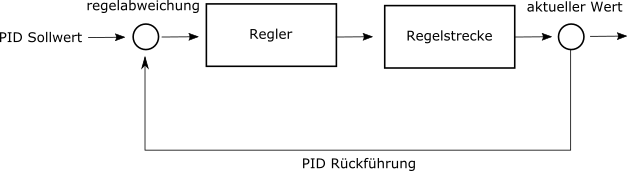
In de afbeelding kunt u zien dat de PID-feedbackwaarde van het PID-setpoint wordt afgetrokken. Hieruit wordt het verschilsignaal gegenereerd. Als de twee waarden gelijk zijn, is er geen correctie nodig en zal de frequentieregelaar zijn frequentie niet veranderen. Als de PID-setpointwaarde groter is dan de feedbackwaarde, is het verschilsignaal positief en zal de frequentieregelaar zijn uitgangsfrequentie verhogen totdat de PID-setpointwaarde en de PID-feedbackwaarde gelijk zijn. Dit betekent dat de frequentie continu wordt aangepast zolang er een verschil is tussen het PID-setpoint en de PID-feedbackwaarde.
Eenvoudig voorbeeld:
PID setpoint gelijk aan PID feedback ==> Geen verandering in frequentie op de regelaar
PID setpoint groter dan PID feedback ==> Toename in frequentie op de regelaar
PID setpoint kleiner dan PID feedback ==> Afname in frequentie op de regelaar
Effect van de afzonderlijke onderdelen van de PID-regeling
P – delen:
De P-component is de proportionele component, wat betekent dat het effect alleen afhankelijk is van het momentele verschil tussen het PID-setpoint en de PID-feedback. Het nadeel is echter dat hoe dichter het setpoint en de feedback bij elkaar komen, hoe kleiner de correctie wordt. Dit vertraagt het regelgedrag. In theorie wordt het setpoint nooit bereikt.
I – Delen:
De I-component kan het probleem oplossen dat de P-component het setpoint niet bereikt. De I-component integreert het verschil tussen het setpoint en de feedback. Zelfs bij kleine verschillen wordt het correctiesignaal na enige tijd groot genoeg om de fout tussen het PID-setpoint en de PID-feedback te corrigeren.
D – Delen:
De D-component lost een ander probleem van de P-regelaar op. Aangezien het correctiesignaal nooit groter kan zijn dan het verschil tussen het PID-setpoint en de PID-feedback, kan de D-component dit verschil kortstondig versterken en zo de respons van de regelaar versnellen. Dit wordt echter alleen aanbevolen als er geen goed regelgedrag wordt bereikt met de P- en I-componenten.
« Back