Regulacja PID
Podstawy regulacji PID
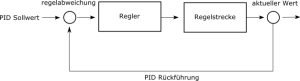
Regulator PID to struktura sterująca, która próbuje regulować określoną zmienną sterującą (ciśnienie, temperaturę itp.) do określonej wartości zadanej (wartość zadana PID). Aby to zrobić, regulator wymaga informacji o aktualnym stanie systemu w postaci zmierzonej wartości (czujnik ciśnienia, czujnik temperatury itp.). Sygnał ten nazywany jest sprzężeniem zwrotnym PID.
Ta struktura sterowania zazwyczaj składa się z trzech części: P = Proporcjonalny, I = Integralny i D = Różnicowy.
W jaki sposób jest to regulowane?
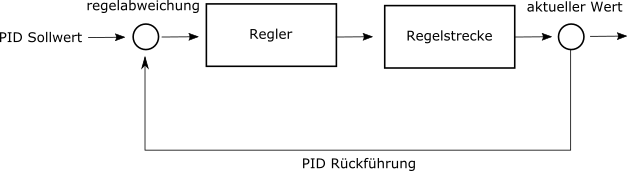
Na rysunku widać, że wartość sprzężenia zwrotnego PID jest odejmowana od wartości zadanej PID. Na tej podstawie generowany jest sygnał różnicy. Jeśli obie wartości są takie same, korekta nie jest konieczna, a przetwornica częstotliwości nie zmieni swojej częstotliwości. Jeśli wartość zadana PID jest większa niż wartość sprzężenia zwrotnego, sygnał różnicy jest dodatni i przetwornica częstotliwości zwiększy swoją częstotliwość wyjściową, aż wartość zadana PID i wartość sprzężenia zwrotnego PID będą równe. Oznacza to, że częstotliwość jest regulowana w sposób ciągły, dopóki istnieje różnica między wartością zadaną PID a wartością sprzężenia zwrotnego PID.
Prosty przykład:
Wartość zadana PID równa sprzężeniu zwrotnemu PID ==> Brak zmiany częstotliwości na falowniku
Wartość zadana PID większa niż sprzężenie zwrotne PID ==> Wzrost częstotliwości na falowniku
Wartość zadana PID mniejsza niż sprzężenie zwrotne PID ==> Zmniejszenie częstotliwości na falowniku
Wpływ poszczególnych części regulacji PID
P – udział:
Składnik P jest składnikiem proporcjonalnym, co oznacza, że efekt zależy tylko od chwilowej różnicy między wartością zadaną PID a sprzężeniem zwrotnym PID. Wadą jest jednak to, że im bardziej wartość zadana i sprzężenie zwrotne zbliżają się do siebie, tym mniejsza jest korekta. Spowalnia to zachowanie sterowania. Teoretycznie wartość zadana nigdy nie zostaje osiągnięta.
I – Udostępnij:
Składowa I może rozwiązać problem, gdy składowa P nie osiąga wartości zadanej. Składowa I całkuje różnicę pomiędzy wartością zadaną a sprzężeniem zwrotnym. Nawet przy małych różnicach, sygnał korekcyjny staje się wystarczająco duży po pewnym czasie, aby skorygować błąd między wartością zadaną PID a sprzężeniem zwrotnym PID.
D – Udostępnij:
Komponent D rozwiązuje kolejny problem regulatora P. Ponieważ sygnał korekcyjny nigdy nie może być większy niż różnica między wartością zadaną PID a sprzężeniem zwrotnym PID, składowa D może na krótko wzmocnić tę różnicę, a tym samym przyspieszyć reakcję regulatora. Jest to jednak zalecane tylko wtedy, gdy dobre zachowanie regulatora nie zostało osiągnięte za pomocą składowych P i I.
« Powrót