PID-kontrol
Grundlæggende om PID-kontrol
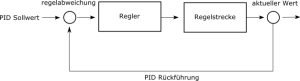
En PID-regulator er en reguleringsstruktur, der forsøger at regulere en specifik reguleringsvariabel (tryk, temperatur osv.) til et bestemt setpunkt (PID-setpunkt). For at gøre dette har controlleren brug for oplysninger om systemets aktuelle status i form af en målt værdi (tryksensor, temperatursensor osv.). Dette signal kaldes PID-feedback.
Denne kontrolstruktur har normalt tre dele: P = Proportional, I = Integral og D = Differentiel.
Hvordan er dette reguleret?
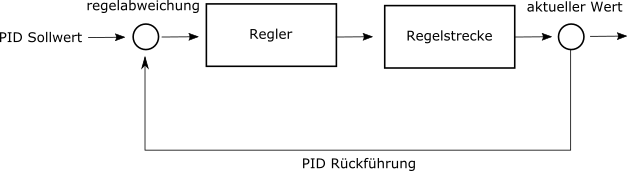
På billedet kan du se, at PID-feedbackværdien trækkes fra PID-setpunktet. Forskelssignalet genereres ud fra dette. Hvis de to værdier er ens, er det ikke nødvendigt at korrigere, og frekvensomformeren ændrer ikke sin frekvens. Hvis PID-setpoint-værdien er større end feedback-værdien, er differenssignalet positivt, og frekvensomformeren vil øge sin udgangsfrekvens, indtil PID-setpoint-værdien og PID-feedback-værdien er ens. Det betyder, at frekvensen justeres kontinuerligt, så længe der er en forskel mellem PID-setpunktet og PID-feedbacken.
Simpelt eksempel:
PID-sætpunkt lig med PID-feedback ==> Ingen ændring i frekvens på inverteren
PID-sætpunkt større end PID-feedback ==> Stigning i frekvens på inverteren
PID-sætpunkt mindre end PID-feedback ==> Reduktion i frekvens på inverteren
Effekt af de enkelte dele af PID-reguleringen
P – del:
P-komponenten er den proportionale komponent, hvilket betyder, at effekten kun er afhængig af den øjeblikkelige forskel mellem PID-setpunktet og PID-feedbacken. Ulempen er dog, at jo tættere setpunktet og feedbacken kommer på hinanden, jo mindre bliver korrektionen. Det gør kontroladfærden langsommere. I teorien bliver målværdien aldrig nået.
I – Del:
I-komponenten kan løse problemet med, at P-komponenten ikke når setpunktet. I-komponenten integrerer forskellen mellem setpunktet og feedbacken. Selv med små forskelle bliver korrektionssignalet efter nogen tid stort nok til at korrigere fejlen mellem PID-setpunktet og PID-feedbacken.
D – Del:
D-komponenten løser et andet problem med P-controlleren. Da korrektionssignalet aldrig kan være større end forskellen mellem PID-setpunktet og PID-feedbacken, kan D-komponenten kortvarigt forstærke denne forskel og dermed fremskynde regulatorens respons. Dette anbefales dog kun, hvis der ikke opnås god kontrol med P- og I-komponenterne.
« Back