Control PID
Fundamentos del control PID
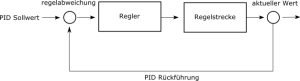
Un controlador PID es una estructura de control que intenta ajustar una variable controlada específica (presión, temperatura, etc.) a un punto de ajuste especificado (punto de ajuste PID). Para ello, el controlador necesita información sobre el estado actual del sistema en forma de un valor medido (sensor de presión, sensor de temperatura, etc.). Esta señal se llama retroalimentación PID.
Esta estructura de control suele tener tres componentes: P = Proporcional, I = Integral y D = Diferencial.
Wie wird hier geregelt?
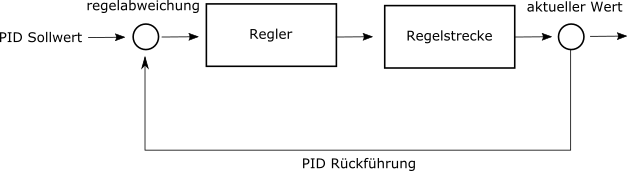
En la imagen se puede ver que el valor de retroalimentación del PID se resta de la consigna del PID. A partir de ahí se genera la señal de diferencia. Si los dos valores son iguales, no es necesaria ninguna corrección y el convertidor de frecuencia no cambiará su frecuencia. Si la consigna PID es mayor que el valor de realimentación, la señal de diferencia es positiva y el variador de frecuencia aumentará su frecuencia de salida hasta que la consigna PID y el valor de realimentación PID sean iguales. Así, la frecuencia se ajusta continuamente mientras haya una diferencia entre la consigna PID y la realimentación PID.
Ejemplo sencillo:
Consigna PID igual a la realimentación PID ==> no hay cambio de frecuencia en el inversor
Consigna PID mayor que la realimentación PID ==> aumento de la frecuencia en el inversor
Consigna PID inferior a la realimentación PID ==> disminución de la frecuencia en el inversor
Efecto de las partes individuales de la regulación PID
P – Compartir:
El componente P es el componente proporcional, lo que significa que el efecto depende sólo de la diferencia momentánea entre la consigna PID y la realimentación PID. Sin embargo, la desventaja es que cuanto más se acerquen la consigna y la realimentación, menor será la corrección. Esto ralentiza el comportamiento del control. En teoría, el punto de consigna no se alcanza nunca.
I – Compartir:
El componente I puede resolver el problema de no alcanzar la consigna del componente P. El componente I integra la diferencia entre la consigna y la realimentación. Incluso con pequeñas diferencias, después de algún tiempo la señal de corrección se vuelve lo suficientemente grande como para corregir el error entre la consigna PID y la retroalimentación PID.
D – Compartir:
El componente D resuelve otro problema del controlador P. Como la señal de corrección nunca puede ser mayor que la diferencia entre la consigna PID y la realimentación PID, el componente D puede amplificar brevemente esta diferencia y acelerar así la respuesta del regulador. Sin embargo, esto sólo se recomienda si no se consigue un buen comportamiento de control con los componentes P e I.
« Volver